Electronic and mechanical design
We designed the entire electronics and mechanical system from scratch — selected motors, wheels, motor drivers, sensors, power regulation circuits, and integrated everything into a cohesive autonomous system.
Selected Project
A capstone project for the BCIT Mechatronics program — an autonomous line-following robot designed from scratch for small-scale automated delivery, selected to represent BCIT at the BC Tech Summit 2018.
Overview
RoboPost was the final capstone project for the intensive two-year BCIT Mechatronics program. The challenge: design and build an autonomous robot completely from scratch in four months while juggling six other courses.
Working with my teammate Tim, we built a line-following autonomous robot with line fork detection, real-time Wi-Fi telemetry, a web interface, and station/destination detection. To operate the robot, the user could select the destination via the web interface, and the robot would autonomously drive around a line map and stop at the correct destination.
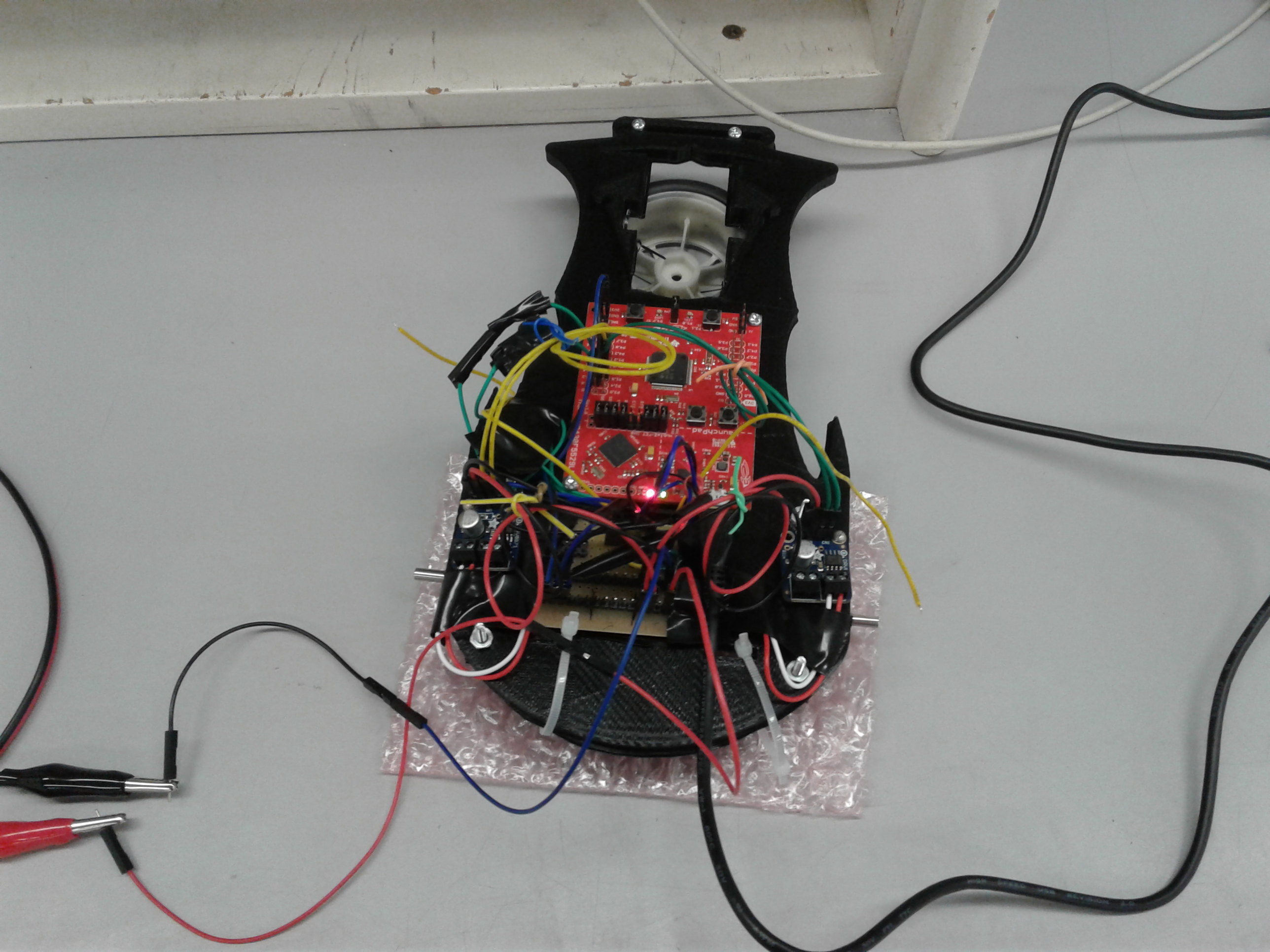
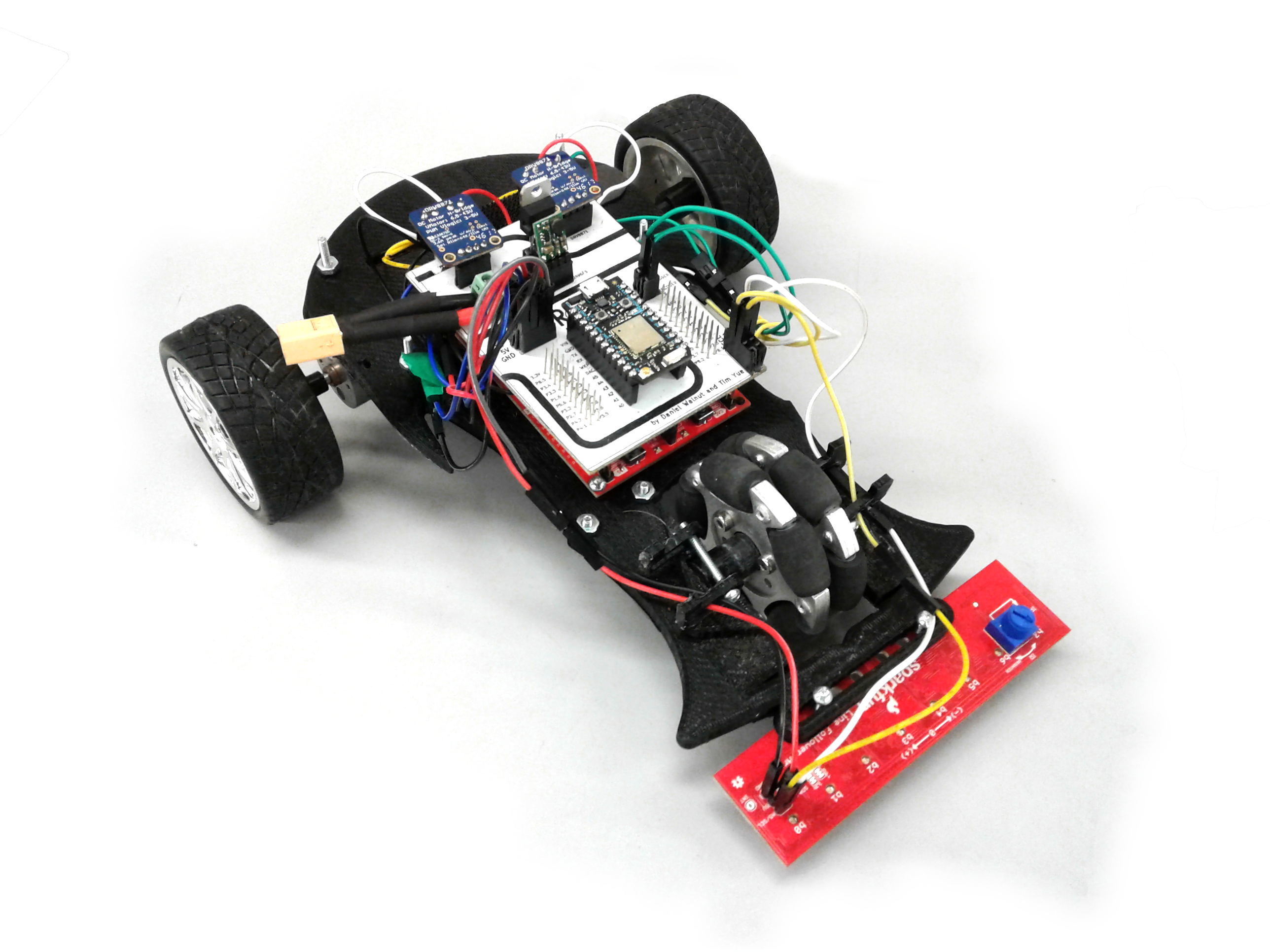
We did all the electronic and mechanical design from scratch — selecting and integrating several electronic and mechanical components from different manufacturers into one cohesive system.
Demo
Scope
We designed the entire electronics and mechanical system from scratch — selected motors, wheels, motor drivers, sensors, power regulation circuits, and integrated everything into a cohesive autonomous system.
We created all code for an autonomous line-following robot with fork detection, station detection, real-time Wi-Fi telemetry, and a web interface for monitoring and control.
We designed and hand-fabricated a custom PCB to integrate all electronics and clean up the wiring. This required learning PCB design on the fly, and manufacturing the board ourselves under tight time constraints.
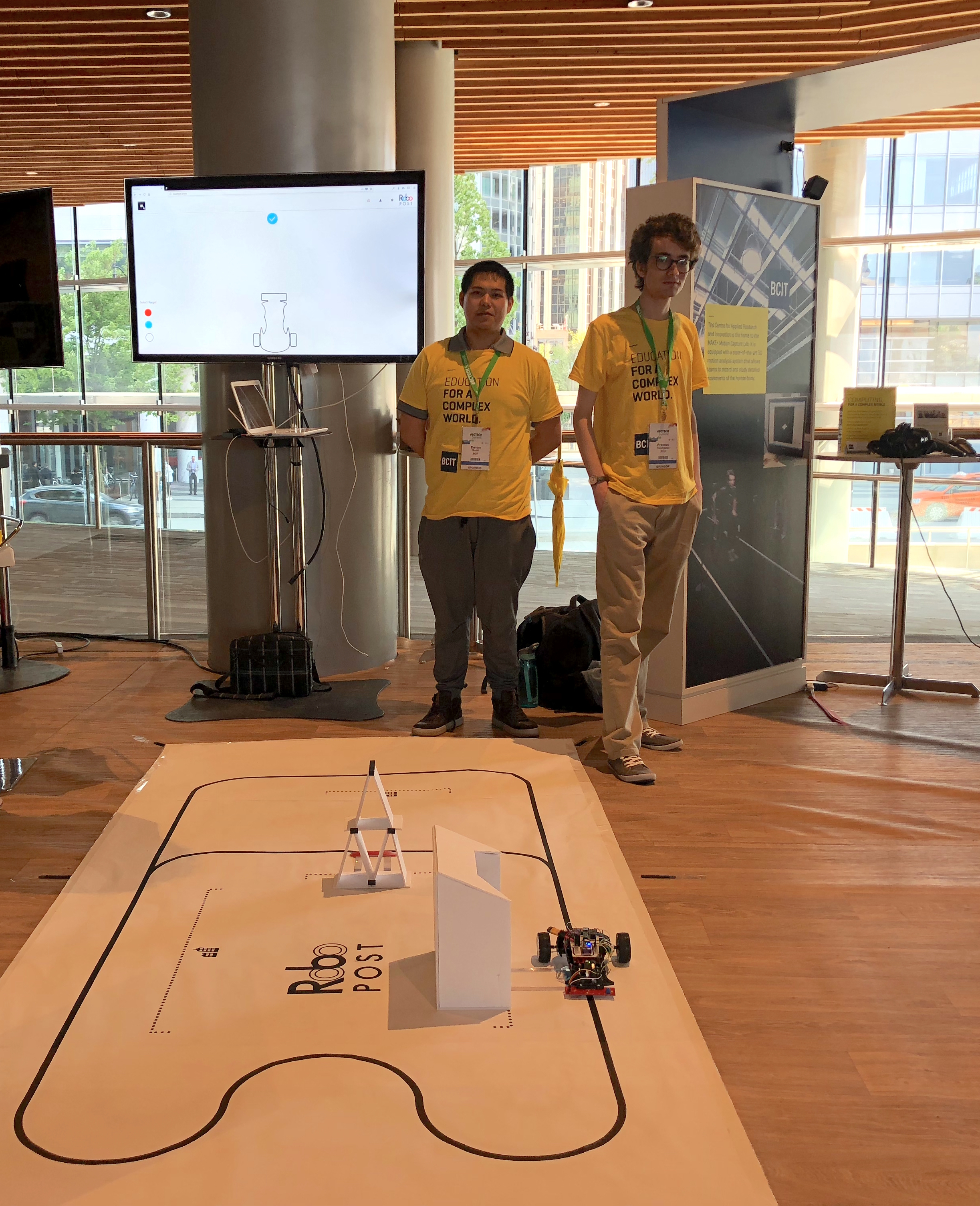
We were selected alongside a few other top BCIT projects to represent the institution at the BC Tech Summit 2018, a large technology conference.
Visuals

References